Primary surface measurement reported
Surface wettability was reported as water contact angle (θ) measured on instrumented SLA titanium surfaces.
Client Citation Analysis
Surface wettability was reported as water contact angle (θ) measured on instrumented SLA titanium surfaces.
Surface wettability was evaluated using a droplet shape analyser (Dropometer, Droplet Lab, Canada), with images analysed in dedicated software using a polynomial fit to calculate left and right contact angles.
Contact angle results were presented in Table 2 and Fig. 6 and used to compare wettability differences across rotary brush decontamination groups relative to the control. The authors interpret wettability changes alongside the study’s surface topography and composition characterisation to describe how mechanical instrumentation modifies implant-relevant surface properties.
Contact angle measurements were taken from five discs in each group, with five repeat measurements per disc (n = 125; 25 measurements per group), and the mean contact angle was computed for each group as a representative value.
Surface wettability was measured as contact angle (θ) using ultrapure water droplets deposited on treated SLA titanium surfaces and analysed by droplet shape analysis.
Surface morphology/topography was evaluated by field emission scanning electron microscopy (FE-SEM) and gross surface photography. Surface elemental composition was measured by SEM-EDX, and surface roughness was measured by 3-D optical profilometry using three-dimensional parameters (Sa, Sz, Ssk, Sku, Sdq, Sdr) following ISO 25178–2:2012.
EOS 600D (CANON, Japan)
Field Emission Scanning Electron Microscope (FE-SEM) (Quanta FEG 250, FEI Company, Hillsboro, Oregon, USA)
Energy-Dispersive X-ray Spectrometry (SEM-EDX; X-Max, Oxford Instruments, Oxford, England)
Aztec 3.3 (Oxford Instruments, Oxford, England)
3-D optical surface profilometer (TopMap Micro.View, Polytech, Baden-Württemberg, Germany)
TMS 4.2 (Polytech, Baden-Württemberg, Germany)
droplet shape analyser (Dropometer, Droplet Lab, Canada)
The authors used a droplet shape analyser (Dropometer, Droplet Lab, Canada) to determine water contact angles as a measure of surface wettability. An automated dispenser deposited a 3 µl ultrapure water droplet onto each treated surface at 23 °C, images were captured after 5 s, and dedicated software applied a polynomial fit to calculate contact angles on the right and left sides of the droplet; group mean contact angles were then computed as representative values for analysis.
In this study, Dropometer-derived contact angles were used to compare how different rotary brush decontamination methods changed wettability relative to the untreated control.
Results for contact angle (θ) showed significant differences among groups by Kruskal–Wallis testing (p < 0.001), with outcomes presented in Table 2 and Fig. 6.
Further analysis reported that the LB group’s contact angle was similar to the control (p > 0.05), with medians of 85.9° (LB) and 84.8° (CTR) in Table 2.
The IB and PIB groups exhibited significantly higher wettability than the control (p < 0.05), indicated by lower contact angles, and the authors state these two groups reduced the contact angle to a similar extent (Table 2 medians: 67.45° (IB) and 65.3° (PIB)).
he NiTiB group was reported as significantly more wettable than the control (p < 0.05) but reduced contact angle to a lesser degree than IB and PIB (Table 2 median: 81.0°).
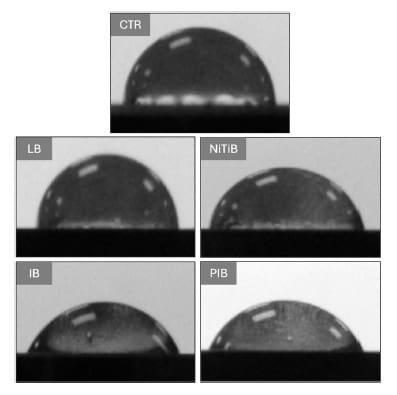
Shows representative water droplets used for contact-angle assessment of surface wettability across the decontamination groups.
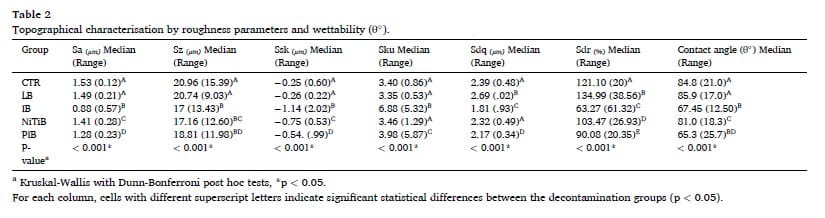
Lists median (range) contact angle (θ°) by group together with multiple 3D roughness parameters, enabling direct comparison of wettability with topographical characterisation.
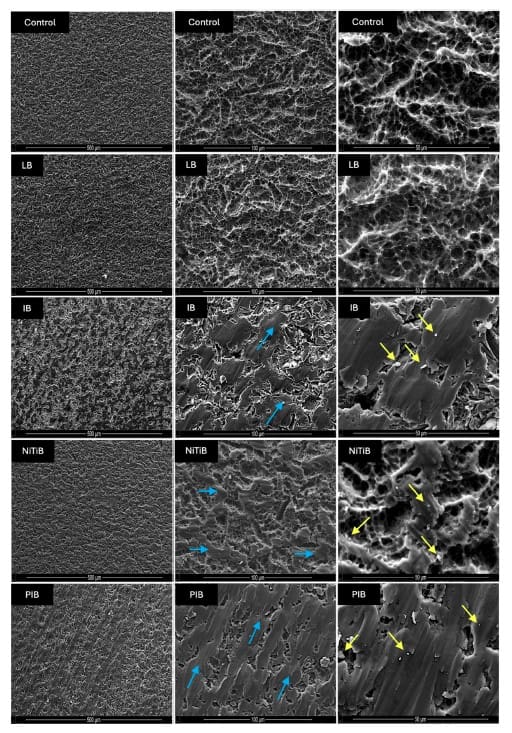
Provides FE-SEM images illustrating how rotary brush instrumentation altered SLA surface morphology, which the paper discusses alongside wettability results.
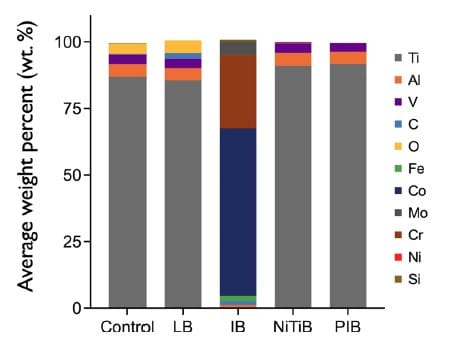
Summarises elemental composition (wt%) after mechanical instrumentation, used in the paper’s broader interpretation of surface property changes alongside contact angle.
The authors frame peri-implantitis decontamination as a process that can modify implant surface properties, and they evaluate these changes by combining wettability (contact angle) with surface morphology, roughness, and elemental composition measurements. Within this approach, the contact angle data provide a direct, quantitative comparison of how different rotary brush systems influence surface wettability of SLA titanium.
In the discussion, the authors connect altered wettability to the broader question of how instrumentation-induced surface changes may relate to implant performance, while situating their findings within the context of clinically used implant surface characteristics.
The study reports a defined protocol using a droplet shape analyser (Dropometer, Droplet Lab, Canada) with a 3 µl ultrapure water droplet, imaging at 5 s, and polynomial-fit analysis of left/right angles.
Contact angle results show that wettability changes depended on the rotary brush system, with IB, NiTiB, and PIB reported as more wettable than the control (p 0.05).
The paper reports median (range) contact angles for each group (CTR 84.8°, LB 85.9°, IB 67.45°, NiTiB 81.0°, PIB 65.3°) to compare decontamination methods on a common wettability metric.
The contact angle results are discussed in the context of FE-SEM morphology, 3D roughness parameters, and SEM-EDX elemental composition to describe how mechanical instrumentation alters multiple surface properties.